Rectangular Coordinate System in Space
Let ‘O’ be any point in space and →X'OX, →Y'OY and →Z'OZ be three lines perpendicular to each other. These lines are known as coordinate axes and O is called origin. The planes XY, YZ, ZX are known as the coordinate planes.
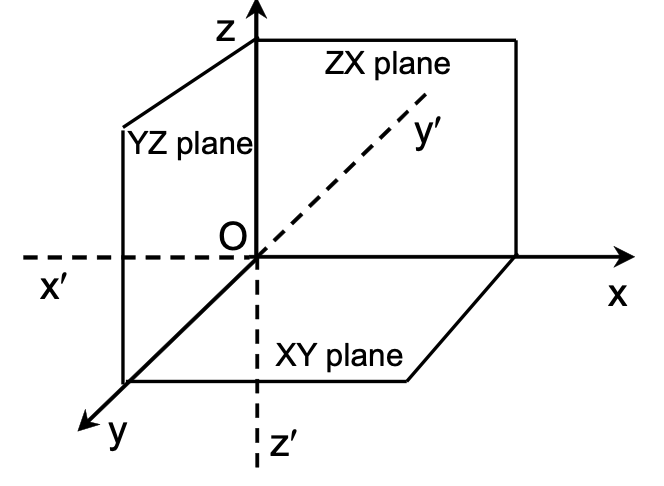
Coordinates of a Point in Space:
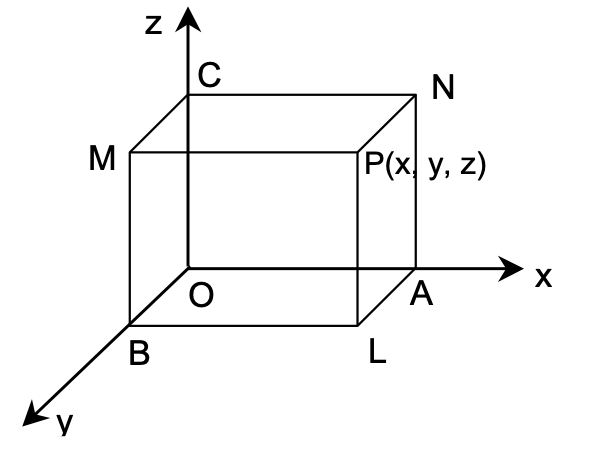
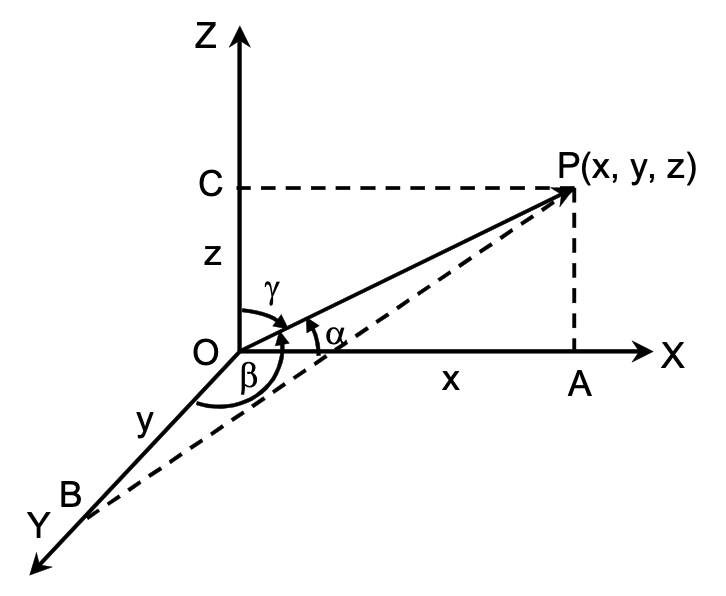
Consider a point P in space. The position of the point P is given by triad (x, y, z) where x, y, z are perpendicular distance from YZ-plane, ZX-plane and XY-plane respectively.
If we assume î, 𝕣, 𝕤 unit vectors along OX, OY, OZ respectively, then position vector of point P is xî + y𝕣 + z𝕤 or simply (x, y, z).
Note:
- x-axis = { (x, y, z) | y = z = 0 }
- y-axis = { (x, y, z) | x = z = 0 }
- z-axis = { (x, y, z) | x = y = 0 }
- xy plane = { (x, y, z) | z = 0 }
- yz plane = { (x, y, z) | x = 0 }
- zx plane = { (x, y, z) | y = 0 }
- OP = √x2 + y2 + z2
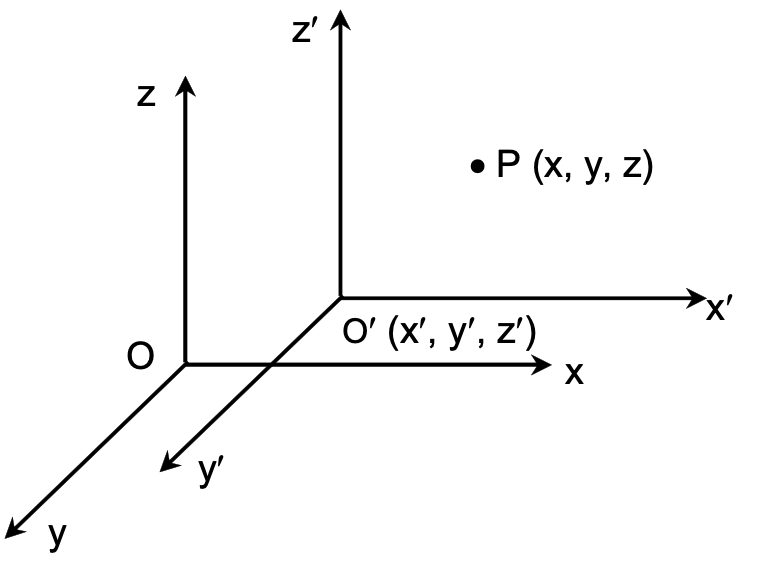
Shifting the Origin:
Shifting the origin to another point without changing the directions of the axes is called the translation of axes.
Let the origin O be shifted to another point
O' (x', y', z') without changing the direction of axes. Let the new coordinate frame be O'X'Y'Z'. Let P (x, y, z) be a point with respect to the coordinate frame OXYZ.
Then, coordinate of point P w.r.t. new coordinate frame O' X' Y' Z' is (x1, y1, z1), where
x1 = x – x', y1 = y – y', z1 = z – z'
Note:
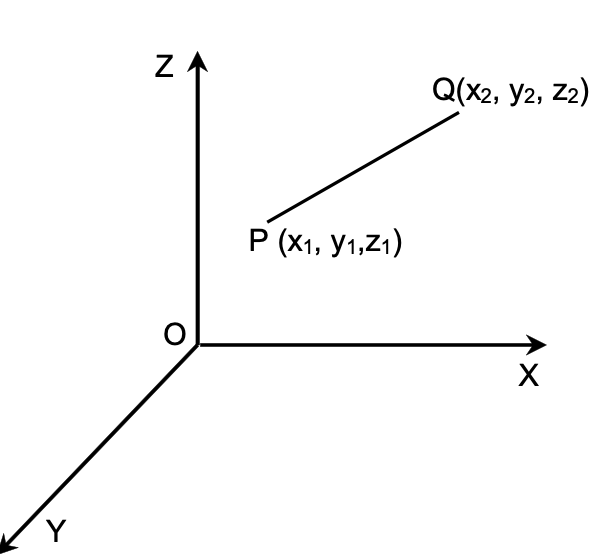
- Distance between the points P(x1, y1, z1) and Q(x2, y2, z2) is
√[(x1 - x2)2 + (y1 - y2)2 + (z1 - z2)2] - The point dividing the line joining P(x1, y1, z1) and Q(x2, y2, z2) in m : n ratio is
( (m x2 + n x1)/(m + n), (m y2 + n y1)/(m + n), (m z2 + n z1)/(m + n) ) where m + n ≠ 0 - The coordinates of centroid of a triangle having vertices A (x1, y1, z1), B (x2, y2, z2) and C (x3, y3, z3) is
G ( (x1 + x2 + x3)/3, (y1 + y2 + y3)/3, (z1 + z2 + z3)/3 )
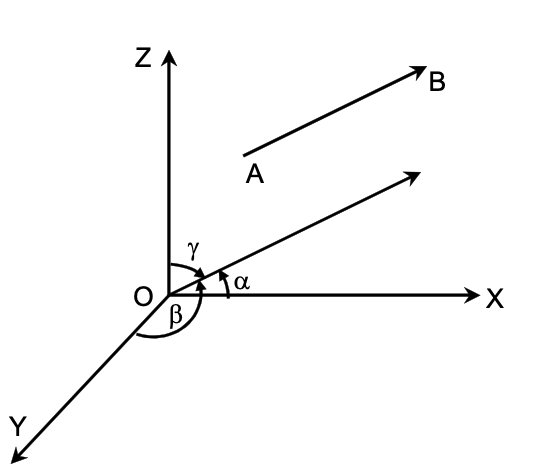
Direction Cosines of a Line
If α, β, γ be the angles which a given directed line makes with the positive directions of the co-ordinate axes, then cosα, cosβ, cosγ are called the direction cosines of the given line and are generally denoted by l, m, n respectively.
Thus, l = cosα, m = cosβ and n = cosγ
By the definition it follows that the direction cosine of the axis of x are respectively cos0°, cos90°, cos90° i.e. (1, 0, 0).
Similarly direction cosines of the axes of y and z are respectively (0, 1, 0) and (0, 0, 1).
Relation between the Direction Cosines:
Let OP be any line through the origin O which has direction cosines l, m, n.
Let P ≡ (x, y, z) and OP = r
Then OP² = x² + y² + z² = r² …. (1)
From P draw PA, PB, PC perpendicular on the coordinate axes, so that
OA = x, OB = y, OC = z.
Also, ∠POA = α, ∠POB = β and ∠POC = γ.
From triangle AOP, l = cosα = x/r ⇒ x = lr
Similarly y = mr and z = nr
Hence from (1)
r²(l² + m² + n²) = x² + y² + z² = r² ⇒ l² + m² + n² = 1
Note:
- If the coordinates of any point P be (x, y, z) and l, m, n be the direction cosines of the line OP, O being the origin, then (lr, mr, nr) will give us the co-ordinates of a point on the line OP which is at a distance r from (0, 0, 0).
Direction Ratios:
If a, b, c are three numbers proportional to the direction cosine l, m, n of a straight line, then a, b, c are called its direction ratios. They are also called direction numbers or direction components.
Hence by definition, we have
l/a = m/b = n/c = k (say)
⇒ l = ak, m = bk, n = ck ⇒ k2(a2 + b2 + c2) = l2 + m2 + n2 = 1
⇒ k = ± 1 root a2 + b2 + c2 = ± 1∑a2
∴ l = ± a∑a2 . Similarly, m = ± b∑a2 and n = ± c∑a2
where the same sign either positive or negative is to be chosen throughout.
Example: If 2, –3, 6 be the direction ratios, then the actual direction cosines are 27 , –37 , 67 .
Parallel Lines:
Since parallel lines have the same direction, it follows that the direction cosines of two or more parallel straight lines are the same. So in case of lines, which do not pass through the origin, we can draw a parallel line passing through the origin and direction cosines of that line can be found.
Direction Cosine of a Line
Direction Cosine of a Line joining two given Points:
The direction ratios of line PQ joining P (x1, y1, z1) and Q(x2, y2, z2) are x2 - x1 = a (say), y2 - y1 = b (say), and z2 - z1 = c (say).
Then direction cosines are
l = (x2 - x1)⁄√Σ(x2 - x1)2, m = (y2 - y1)⁄√Σ(x2 - x1)2, n = (z2 - z1)⁄√Σ(x2 - x1)2
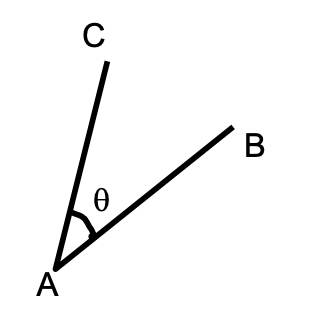
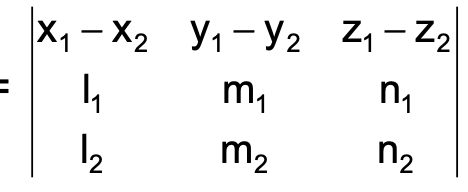
Angle between two Lines:
Let θ be the angle between two straight lines AB and AC whose direction cosines are given whose direction cosines are l1, m1, n1 and l2, m2, n2 respectively, is given by
cosθ = l1l2 + m1m2 + n1n2
If direction ratios of two lines are a1, b1, c1 and a2, b2, c2 are given, then angle between two lines is given by
cos θ = a1a2 + b1b2 + c1c2
√(a12 + b12 + c12) • √(a22 + b22 + c22)
Particular Results:
We have, sin2θ = 1 − cos2θ
= (l12 + m12 + n12)(l22 + m22 + n22) − (l1l2 + m1m2 + n1n2)2
= (l1m2 − l2m1)2 + (m1n2 − m2n1)2 + (n1l2 − n2l1)2
⇒ sinθ = ± √Σ(l1m2 − l2m1)2.
- Condition of perpendicularity:
If the given lines are perpendicular, then θ = 90° i.e. cos θ = 0
⇒ l1l2 + m1m2 + n1n2 = 0 or a1a2 + b1b2 + c1c2 = 0. - Condition of parallelism:
If the given lines are parallel, then θ = 0° i.e. sin θ = 0
⇒ (l1m2 – l2m1)2 + (m1n2 – m2n1)2 + (n1l2 – n2l1)2 = 0
which is true, only when
l1m2 – l2m1 = 0, m1n2 – m2n1 = 0 and n1l2 – n2l1 = 0 ⇒
l1/l2 = m1/m2 = n1/n2
Similarly, a1/a2 = b1/b2 = c1/c2.
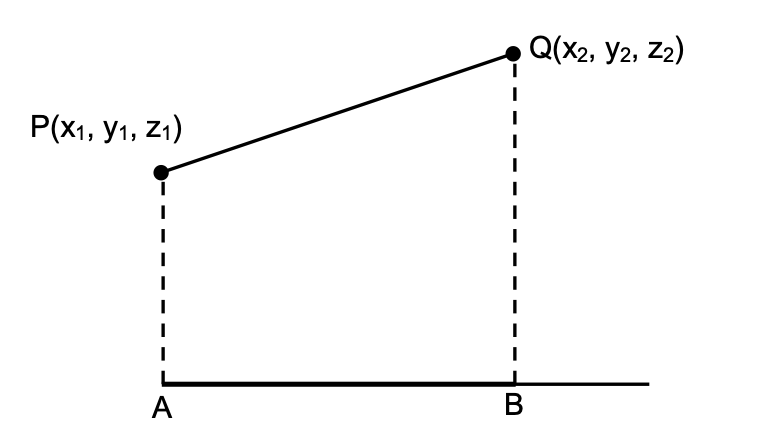
Projection of a Line:
Projection of the line joining two point P (x1, y1, z1) and Q (x2, y2, z2) on another line whose direction cosines are l, m, n is
AB = l(x2 – x1) + m(y2 – y1) + n(z2 – z1)
Perpendicular Distance of a Point from a Line
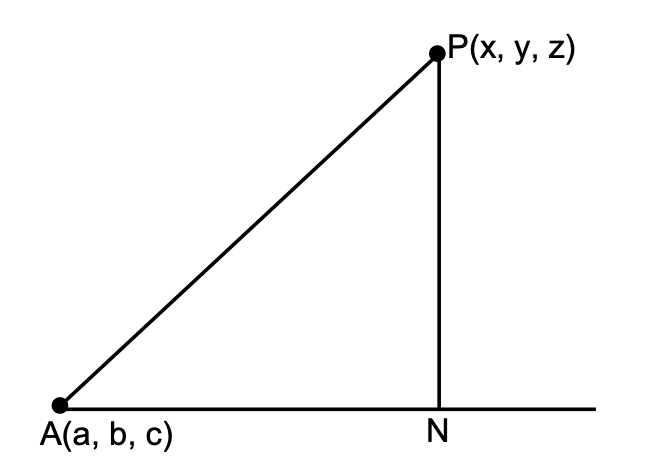
Perpendicular Distance of a Point from a Line:
Let AB is straight line passing through point A (a, b, c) and having direction cosines l, m, n.
AN = projection of line AP on straight line AB
―――――――――――――――――――――――
√(x − a)2 + (y − b)2 + (z − c)2
and AP = √(x − a)2 + (y − b)2 + (z − c)2
∴ perpendicular distance of point P
Area of a Triangle
Area of a Triangle
| y1 | z1 | 1 |
| y2 | z2 | 1 |
| y3 | z3 | 1 |
| x1 | z1 | 1 |
| x2 | z2 | 1 |
| x3 | z3 | 1 |
| x1 | y1 | 1 |
| x2 | y2 | 1 |
| x3 | y3 | 1 |
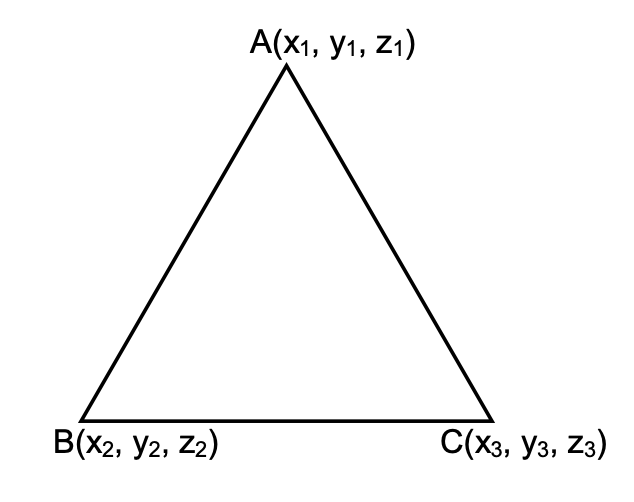
So, area of ΔABC is given by the relation Δ2 = Δx2 + Δy2 + Δz2
The Plane
Definition:
Consider the locus of a point P(x, y, z). If x, y, z are allowed to vary without any restriction for their different combinations, we have a set of points like P. The surface on which these points lie, is called the locus of P. It may be a plane or any curved surface. If Q be any other point on its locus and all points of the straight line PQ lie on it, it is a plane. In other words if the straight line PQ, however small and in whatever direction it may be, lies completely on the locus, it is a plane, otherwise any curved surface.
Equation of Plane in Different Forms:
- General equation of a plane is ax + by + cz + d = 0
- Equation of the plane in Normal form is lx + my + nz = p where p is the length of the normal from the origin to the plane and (l, m, n) be the direction cosines of the normal.
- The equation to the plane passing through P(x₁, y₁, z₁) and having direction ratios (a, b, c) for its normal is a(x − x₁) + b(y − y₁) + c(z − z₁) = 0
- The equation of the plane passing through three non-collinear points (x₁, y₁, z₁), (x₂, y₂, z₂) and (x₃, y₃, z₃) is
| (x − x₁) (y − y₁) (z − z₁) | | (x₂ − x₁) (y₂ − y₁) (z₂ − z₁) | = 0 | (x₃ − x₁) (y₃ − y₁) (z₃ − z₁) |
- The equation of the plane whose intercepts are a, b, c on the x, y, z axes respectively is x/a + y/b + z/c = 1 (a b c ≠ 0)
- Equation of YZ plane is x = 0, equation of plane parallel to YZ plane is x = d.
Equation of ZX plane is y = 0, equation of plane parallel to ZX plane is y = d.
Equation of XY plane is z = 0, equation of plane parallel to XY plane is z = d.
- Four points namely A (x1, y1, z1), B (x2, y2, z2), C (x3, y3, z3) and D (x4, y4, z4) will be coplanar if one point lies on the plane passing through other three points.
Angle between the Planes
Angle between the planes is defined as angle between normals of the planes drawn from any point to the planes.
Angle between the planes a1x + b1y + c1z + d1 = 0 and a2x + b2y + c2z + d2 = 0 is
√[(a12 + b12 + c12)(a22 + b22 + c22)] )
- If a1a2 + b1b2 + c1c2 = 0, then the planes are perpendicular to each other.
- If a1/a2 = b1/b2 = c1/c2 then the planes are parallel to each other.
Perpendicular Distance:
The length of the perpendicular from the point P(x1, y1, z1) to the plane ax + by + cz + d = 0 is
Family of Planes:
Equation of plane passing through the line of intersection of two planes u = 0 and v = 0 is u + λv = 0.
Intersection of a Line and Plane:
If equation of a plane is ax + by + cz + d = 0, then direction cosines of normal to this plane are a, b, c. So angle between normal to the plane and a straight line having direction cosines l, m, n is given by
Then angle between the plane and the straight line is π/2 − θ.
- Plane and straight line will be parallel if al + bm + cn = 0
- Plane and straight line will be perpendicular if a/l = b/m = c/n
Bisector Planes of Angle between two Planes:
The equation of the planes bisecting the angles between two given planes \( a_1x + b_1y + c_1z + d_1 = 0 \) and \( a_2x + b_2y + c_2z + d_2 = 0 \) is

THE STRAIGHT LINE
Straight line in three dimensional geometry is defined as intersection of two planes. So general equation of straight line is stated as the equations of both plane together i.e. general equation of straight line is a1x + b1y + c1z + d1 = 0, a2x + b2y + c2z + d2 = 0 ……(1)
So, equation (1) represents straight line which is obtained by intersection of two planes.
Equation of Straight Line in Different Forms:
Symmetrical Form:
- Equation of straight line passing through point P (x1, y1, z1) and whose direction cosines are l, m, n is
x−x1 l = y−y1 m = z−z1 n - Equation of straight line passing through two points P (x1, y1, z1) and Q (x2, y2, z2) is
x−x1 x2−x1 = y−y1 y2−y1 = z−z1 z2−z1
Note:
The general coordinates of a point on a line is given by (x1 + l r, y1 + m r, z1 + n r) where r is distance between point (x1, y1, z1) and point whose coordinates is to be written.
Shortest Distance between two non Intersecting Line:
Two lines are called non intersecting lines if they do not lie in the same plane. The straight line which is perpendicular to each of non-intersecting lines is called the line of shortest distance. And length of shortest distance line intercepted between two lines is called length of shortest distance.
Method:
Let the equation of two non-intersecting lines be
x - x1/l1 = y - y1/m1 = z - z1/ n1 = r1 (say).... (1)
And x - x2/l2 = y - y2/m2 = z - z2/ n2 = r2 (say).... (2)
Any point on line (1) is P (x1 + l1r1, y1 + m1r1, z1 + n1r1) and on line (2) is
Q (x2 + l2r2, y2 + m2r2, z2 + n2r2).
Let PQ be the line of shortest distance. Its direction ratios will be
[(l1r1 + x1– x2– l2r2), (m1r1 + y1– y2– m2r2), (n1r1 + z1– z2– n2r2)]
This line is perpendicular to both given line. By using condition of perpendicularity we obtain 2 equations in r1 and r2.
So by solving these, values of r1 and r2 can be found. And subsequently point P and Q can be found. The distance PQ is shortest distance.
The shortest distance can be found by PQ
Note: If any straight line is given in general form then it can be transformed into symmetrical form and we can further proceed.
The Sphere
A sphere is a locus of a point which moves in space such that its distance from a fixed point is constant. Fixed point is called centre of sphere and constant distance is called radius of sphere.
Equation of Sphere in Different Forms:
- If centre of sphere is (a, b, c) and radius is r, then equation of sphere is
(x – a)² + (y – b)² + (z – c)² = r². - If centre of sphere is origin and radius is r, then x² + y² + z² = r².
- General form: The general equation of a sphere is
x² + y² + z² + 2ux + 2vy + 2wz + d = 0
Centre of sphere = (–u, –v, –w), radius = √(u² + v² + w² – d). - Diameter form: Equation of a sphere whose extremities of diameter are A (x1, y1, z1) and B (x2, y2, z2) is
(x – x1)(x – x2) + (y – y1)(y – y2) + (z – z1)(z – z2) = 0.